
Master Of Science Electrical Engineering
I got my M.S. in E.E. at the University of Wyoming building out the curriculum and hardware for a microprocessors class that explored building autonomous, wall navigating robots.

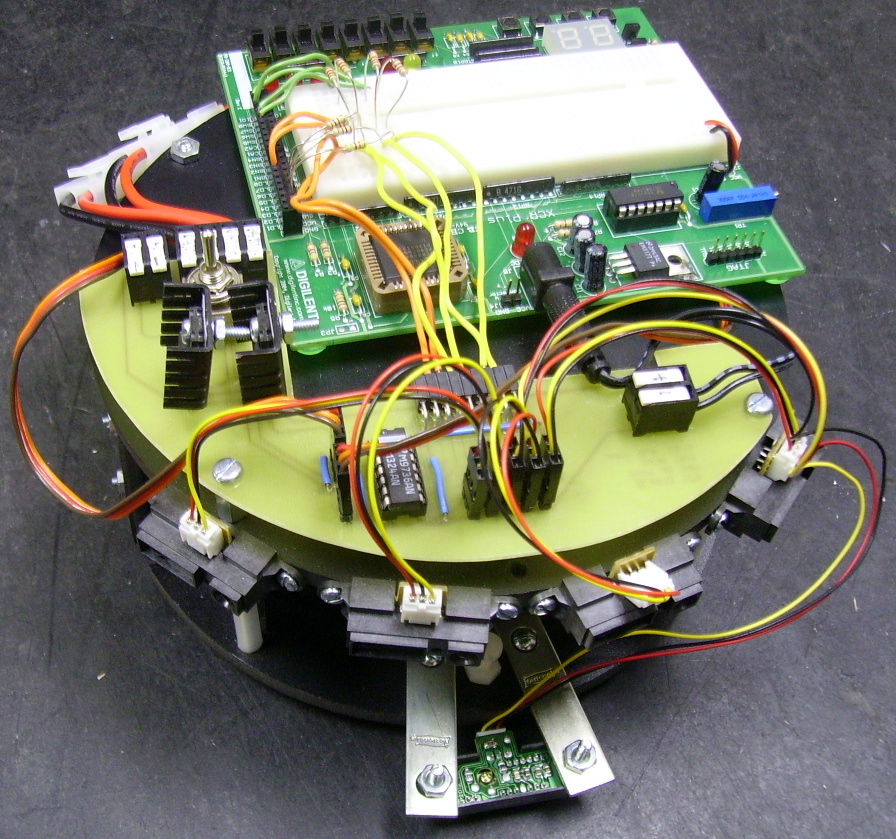
The current HDL Verilog course, EE4490, is based solely on software simulations and not actual hardware implementations. This is a disadvantage to the educational process because students are limited to software results instead of real world, physical interaction. On the other hand, we currently have a separate microprocessors course that is using robots to autonomously navigate a maze and avoid walls. If possible, we would like to have the HDL students working with the same robots. In doing this, we not only accomplish the goal of physical results, but we also create a great basis for a third course which requires both HDL Verilog and microprocessors concepts. To accomplish this task, I used a Xilinx XCR Plus development board to control the robot. I wrote a real time operating system in HDL Verilog that processes the robot’s vision and, in turn, controls its movement. I then wrote a step-by-step guide to walk through the process of programing and controlling each subsystem of the robot. Finally, I compiled a list of implementation suggestions on integrating this educational program into the current curriculum.

Master’s Work Reference: Dr. Steven Barrett
Embedded Devices
Extensive experience with the Motorola HC12 MiniDragon Extensive knowledge of the Motorola HC11 Currently working with Xilinx and Wiring (Processing) IO boards Reference: Dr. Steven Barrett
Java Networking
Designed a Posted Bid economics game for the College of Agriculture Reference: Mr. Jim Ward Reference: Dr. Dale Menkhaus
HDL and Verilog
Designed and graded HDL programming homework assignments Currently designing a maze solving robot in Verilog Reference: Dr. Steven Barrett
Electronics 2 Lab Instructor
I was the lab instructor for Electronics 2, building amplifiers and filters. This was a great experience and I really enjoyed teaching. For the final lab we built an amplifier and blasted some music from my iPod. Reference: Dr. Stanislaw Legowski
